
旋转两指夹爪
RM-RG-11-360-14-ITG
二次开发SDK RM电缸提供完整的编程、示教、参数修改等API 接口,支持且不限于Labview、C#、C++、Python 等编程语言控制。 力位混合控制 内置伺服电机,力度、位置、速度、加减速度等运动属性均可控制。 力矩模式控制简单 通过RM软件平台控制,统筹设备更方便;通过RM-C控制器外置旋钮快捷调整。 自适应夹取功能 无需考虑位置,到达力度则停止运动;支持柔性夹取控制,适合加工小型、柔软、易碎的工件;可反向力度控制。 夹持确认功能 无需外置配备其他检查仪器,使用RM电缸立即实现“检测有无夹取工件”、“夹持途中有无掉落工件”功能。 测量功能 无需外置配备其他检查仪器,利用RM电缸立即实现“判断工件尺寸是否及格”、“测量并输出尺寸”功能。 区域输出功能 RM电缸在运动中到达指定区域内时,将执行“输入指令”、“完成动作”或“输出信号”,可自定义各种指令信号。 自整定功能 减少调试难度,提升功率利用,开箱即用! 振动抑制功能 减少等待时间,降低生产成本,有效提高精度及生产效率。 无限旋转 360°旋转,角度、速度、方向等属性均可控制,不限旋转行程。
产品参数
| 最大旋转速度( °/s) | 1500 | 旋转行程(°) | ±99,999 | ||
| 旋转最大力矩(N.m) | 0.3 | 夹取行程(mm) | 13 | ||
| 负载允许力矩(N.m) | MR: 4.6, MP: 1.9, MY:2.7 | 最大夹持力(N) | 20 | ||
| 通讯协议 | MODBUS RTU | 重量(kg)) | 1.8 | ||
| 旋转精度( °) | ±0.5 | 夹取重复精度(mm) | ±0.02 | ||
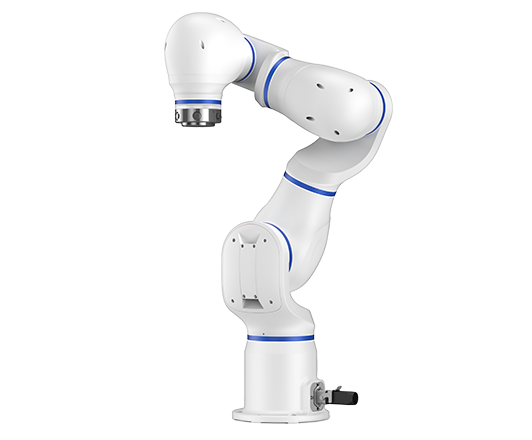
适配机型
GCR5-910
917mm
有效工作半径
5kg
最大负载
3.6m/s
末端最大速度
±0.02mm
重复定位精度
了解更多了解更多
GCR10-1300
1300mm
有效工作半径
10kg
最大负载
3.8m/s
末端最大速度
±0.03mm
重复定位精度
了解更多了解更多
GCR20-1400
1400mm
有效工作半径
20kg
最大负载
2.2m/s
末端最大速度
±0.05mm
重复定位精度
了解更多了解更多
GCR30-1100
1100mm
有效工作半径
30kg
最大负载
2.0m/s
末端最大速度
±0.05mm
重复定位精度
了解更多了解更多
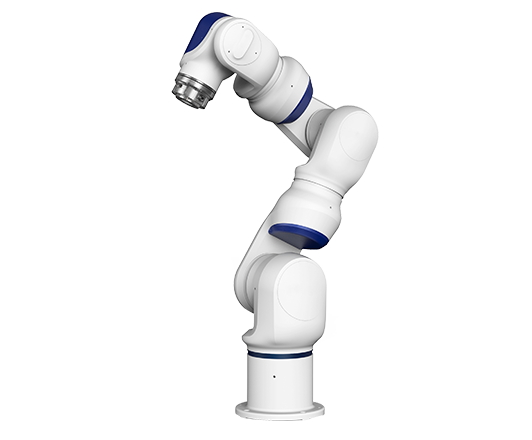
SCR3
600mm
有效工作半径
3kg
最大负载
2.5m/s
末端最大速度
±0.02mm
重复定位精度
了解更多了解更多
SCR5
800mm
有效工作半径
5kg
最大负载
2.0m/s
末端最大速度
±0.02mm
重复定位精度
了解更多了解更多
应用场景


上下料
智能便捷,分拣任务安全又高效


码垛
简化操作,提升效率,生产线上的码垛专家


焊接
焊匠出手,让焊接良品率直线提升


涂胶
涂匠出手,让涂胶良品率直线提升


检测
能够根据不同产品要求快速切换生产模式,适应多品种,小批量生产


装配
简单快捷,让产品装配率直线提升


螺丝锁付
为更精准而生,给客户稳定而高精度的品质保证


物料搬运
便捷准确操作,提升效率,生产线上的专家


喷涂
能够针对涂层材料和工件外形提供出众的喷涂效果


微信公众号

微信视频号
敏于客户需求洞察,精于应用场景探索,笃于自主求索创新
致力于为客户提供最佳解决方案,实现人机和谐的未来
![]()
企业邮箱:Marketing@ducorobots.com
全球运营总部:上海市浦东新区金沪路358弄4号楼
业务咨询热线:400-088-5288
合规邮箱:Report@ducorobots.com




