常见问题
机器人怎么设置装配方向?
|
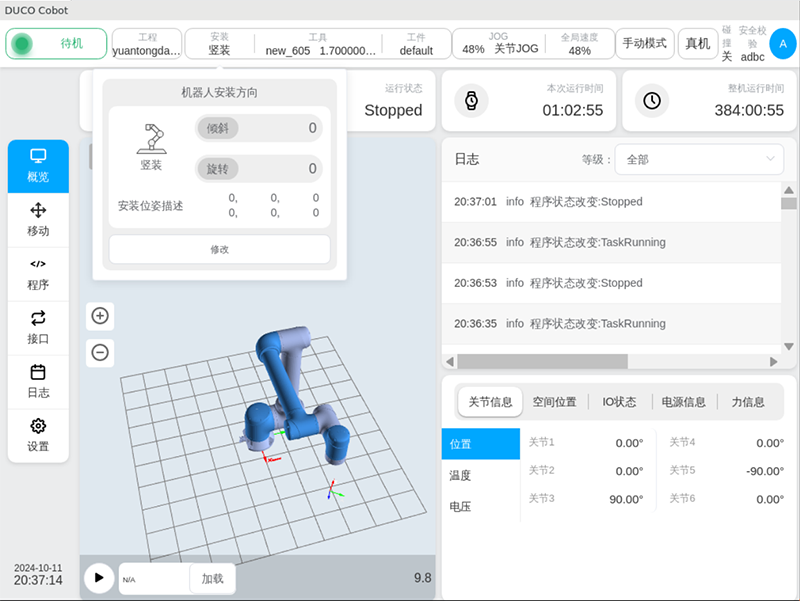
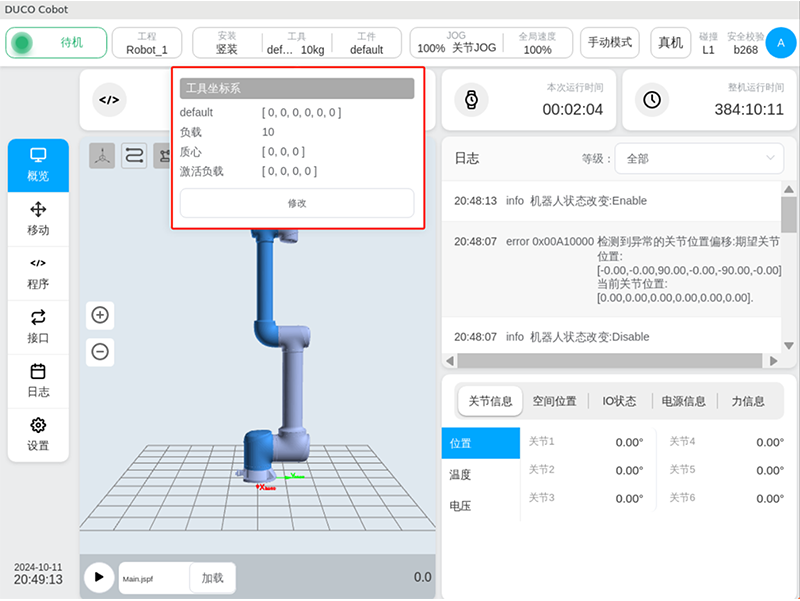
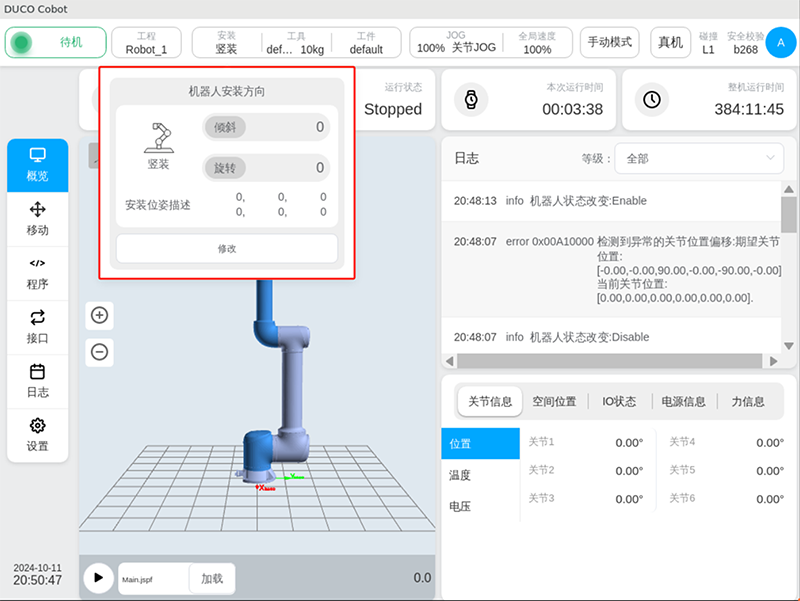
单击“安装”显示框,显示机器人安装方向和安装位姿描述信息弹出框,如图所示。
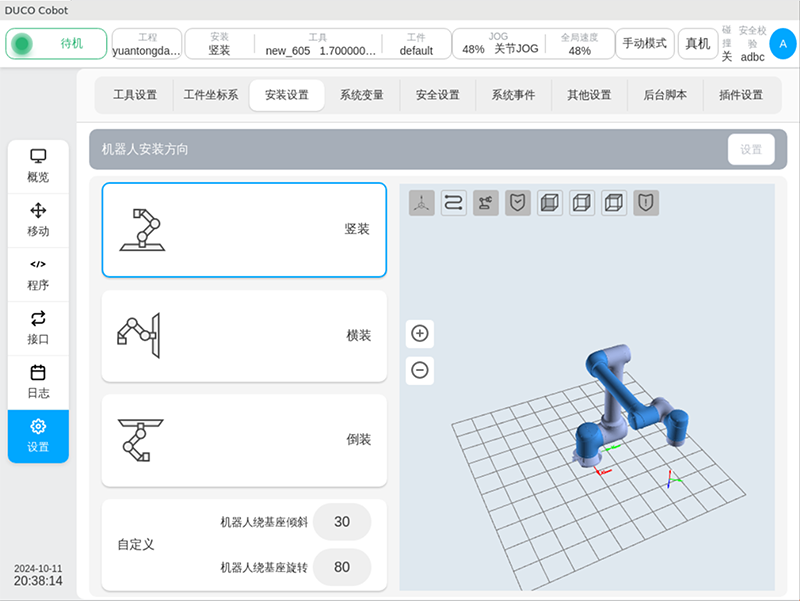
单击“修改”按钮,会跳转到设置界面里安装设置子页面,如图所示。用户可在该页面设置机器人安装方向操作。
|
抱闸检测是什么,为什么有这个弹窗?
|
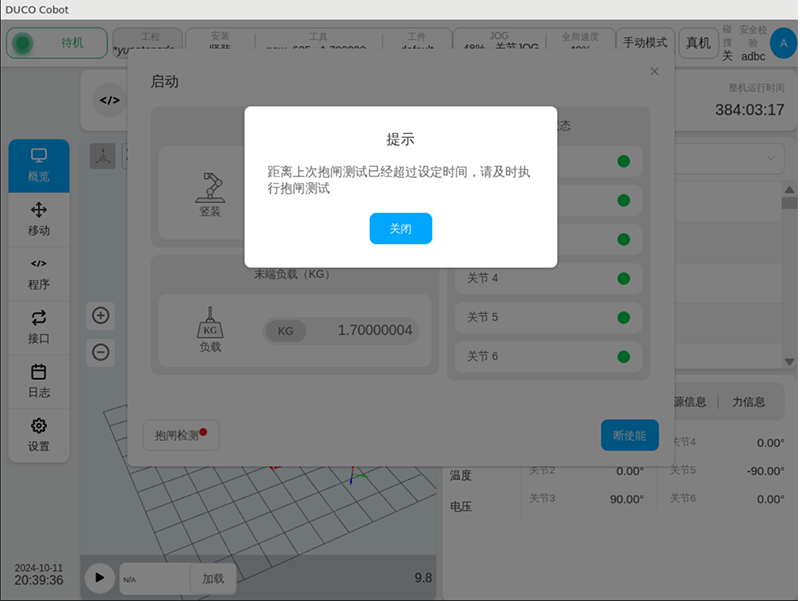
用户需要按期进行抱闸检测,防止机械臂因抱闸失效带来风险。系统会周期性的提醒用户需要进行抱闸检测,出厂默认每隔30天提醒。
当距离上次抱闸检测超过设定时间后,系统将会弹出如下对话框,提示用户需要执行抱闸检测。启动页面的抱闸检测入口将显示小红点提示用户。 |
为什么扭示教器右上角上的钥匙不能切换手自动模式?
|
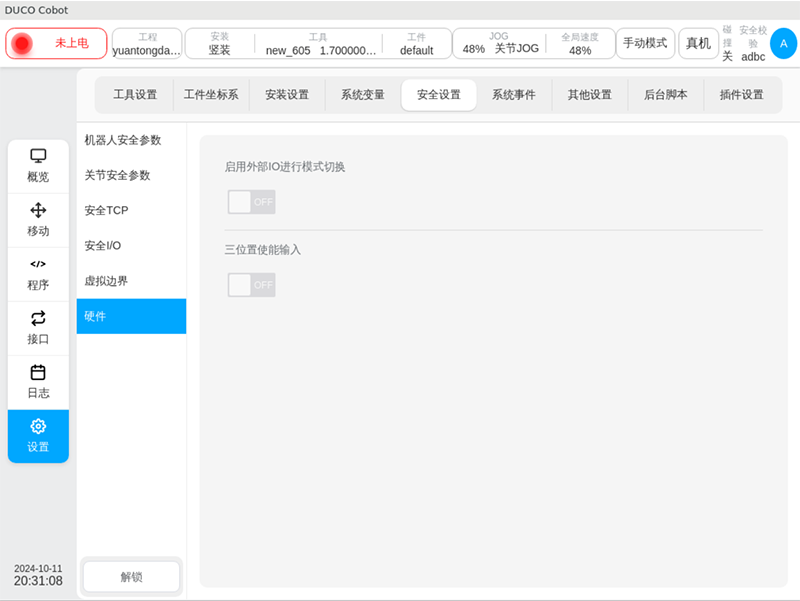
示教器中:点击设置—安全设置—硬件
点击启用外部IO进行模式切换:启用此项,可以通过外部IO进行手自动模式的切换,此时界面状态栏上的模式切换功能无效。 (切换时需要下使能并断电,在修改安全设置时需要输入密码解锁)
|
为什么一手动jog就报警碰撞?
| 检查机器人的负载是否设置正确,安装方向是否与实际相符。 |
碰撞等级怎么修改?
|
示教器中:点击设置—其他设置—碰撞设置
碰撞设置区域可进行碰撞检测等级设置、复位模式和响应模式设置。 碰撞检测等级分为:关闭、等级1、等级2、等级3、等级4、等级5,且等级越高,碰撞检测的灵敏度越高。 碰撞检测复位模式分为手动复位和自动复位两种。 碰撞检测响应模式可选项有保护性停止、安全急停及零力回弹三种, 其中,当选“零力回弹”选项时, 会显示提示语“提示:错误的负载参数存在机械臂异常坠落风险!”。 用户配置好碰撞检测等级、复位模式以及响应模式后,单击“确定”按钮即可。 当碰撞检测响应模式配置为零力回弹模式时,机器人会在检测到碰撞的1s内适应碰撞外力从而产生回弹运动,直到与发生碰撞的外部物体不再接触或接触力极小时停止。
|

末端上的按钮都是什么功能?
|
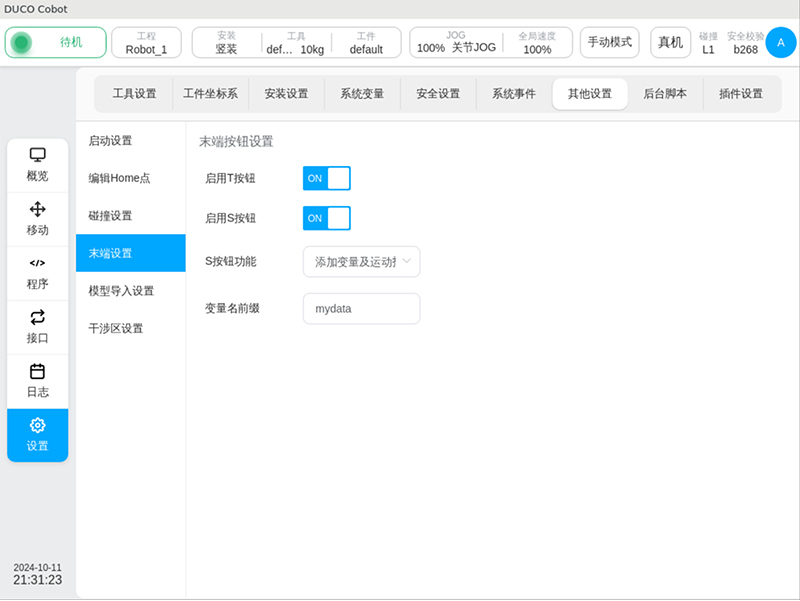
T按钮:
该按钮具有按住牵引机械臂的功能 S按钮: S按钮功能有三种:添加变量、添加运动指令、添加变量及运动指令。 在示教器中:点击设置—其他设置—末端设置中可启用或停止按钮功能
|
怎么回到打包姿态?
|
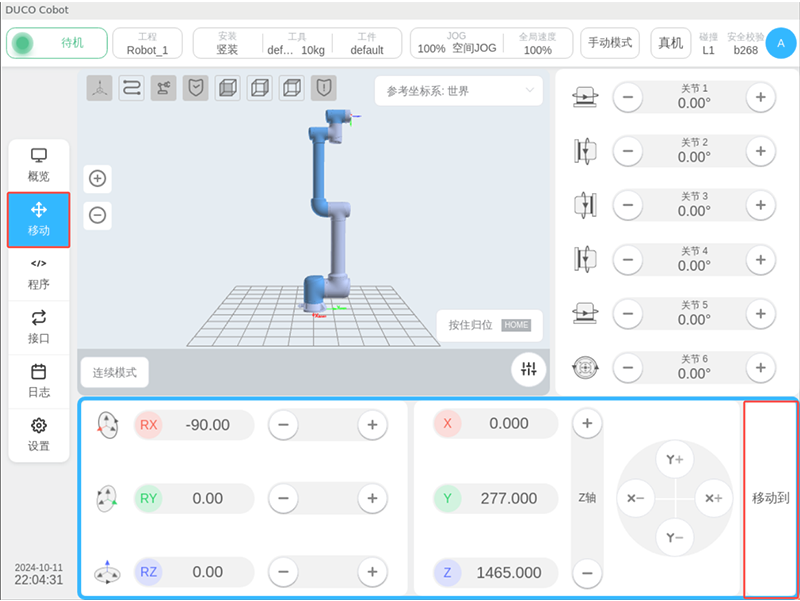
点击切换到示教器中移动页面,点击右下角移动到按钮,如图
勾选打包姿态选项后按住移动到按钮直到机器人移动到位,如图
|

IO接线时怎么使用外部供电?
|
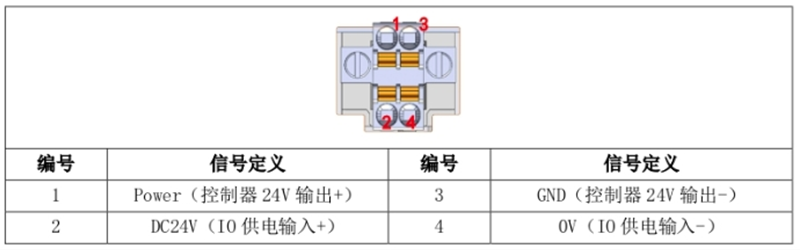
IO POWER(IO供电)接口用于SIO(安全IO)、DIO(数字IO),CIO(可配置IO)接口及内部电路的供电。其接口定义如图1所示:
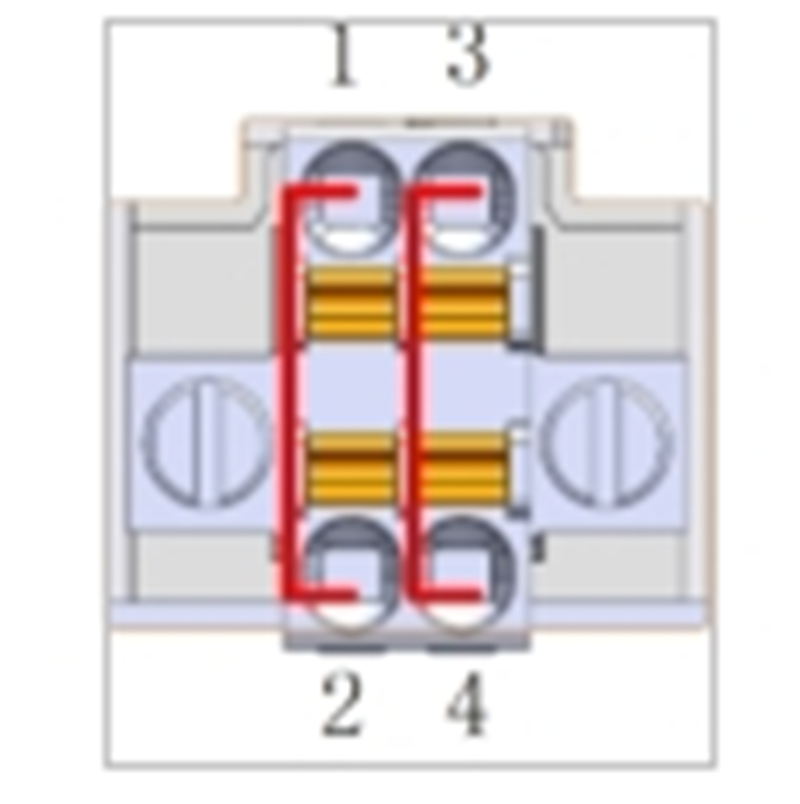
内部供电时,将1号脚与2号脚短接,3号脚与4号短接;此时内部将提供最大2A的24V直流电(如图2)
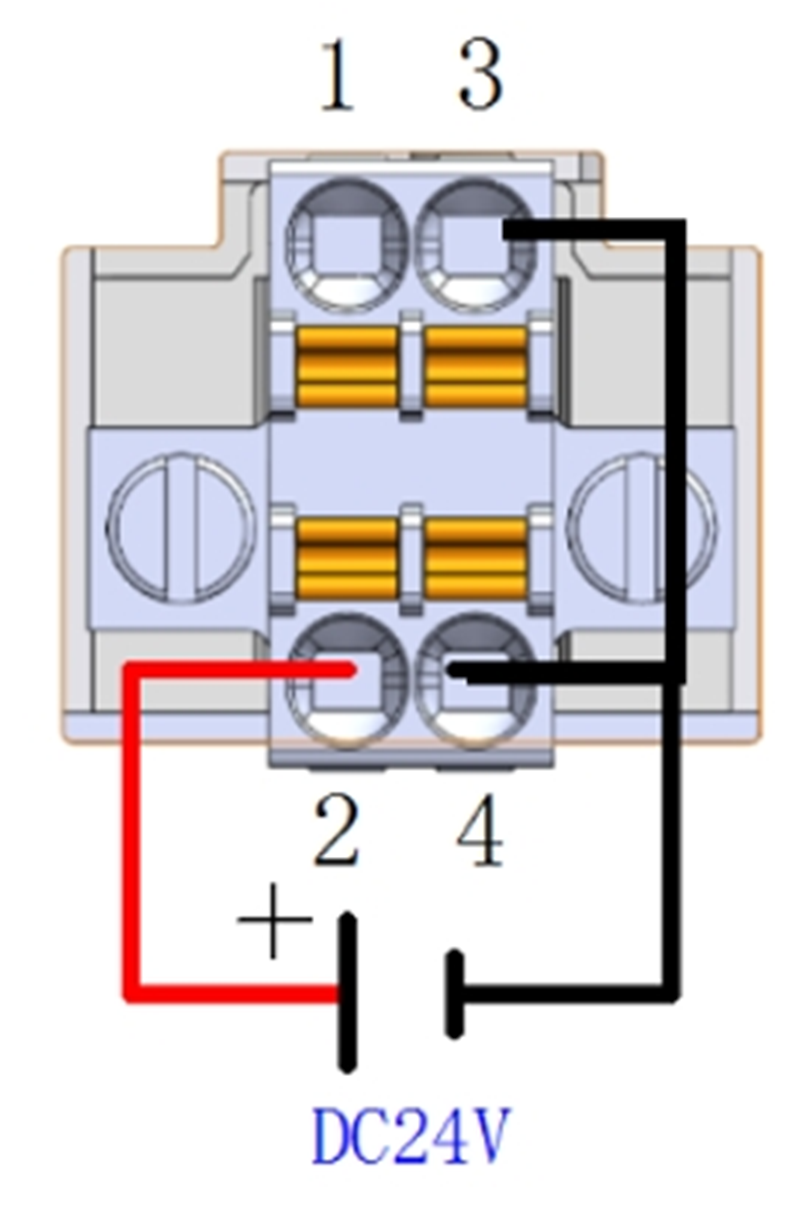
外部供电时,拆除短接线,将2号脚接入外部电源DC24V,将4号脚接入外部电源0V;并且将3号脚与4号短接后共地,供电后外部电源的0V即和系统的48V电源地相连。注意,如果使用的外部电源的0V和外部电源的外壳短路的电源,安装时外壳不能和系统的外壳(PE)相连接。外部供电时,最高承载8A的24V直流电(如图3)
|
U盘插入后机器人为什么没有读取到U盘?
|
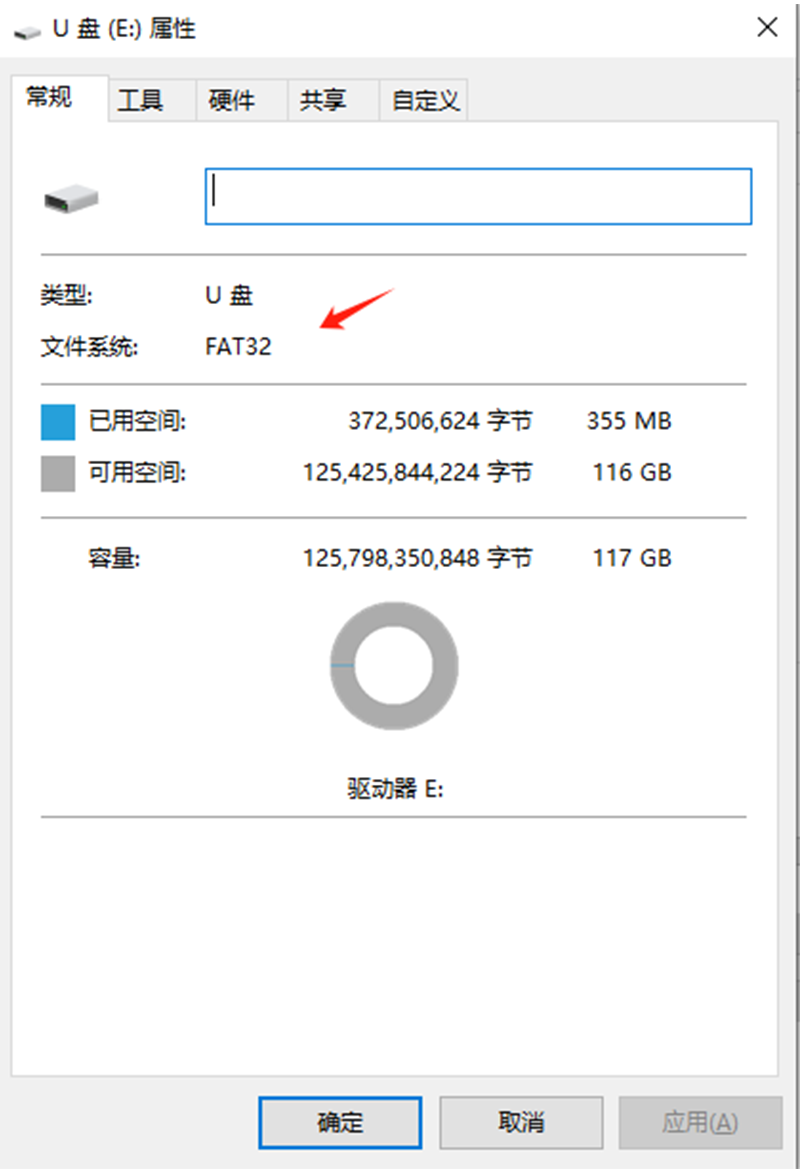
确认U盘格式是否为FAT32格式,不是FAT32格式情况下无法读取。
|